Gradient-Based Optimization of Fluid Flows¶
In this tutorial, you will learn how to:
Build a Tesseract that wraps a differentiable CFD simulator (JAX-CFD)
Run forward evaluations via Tesseract-JAX’s
apply_tesseract()functionPerform gradient-based optimization of the fluid simulation using
scipy.optimize.minimize, leveraging the Tesseract as a fully differentiable simulator
We will optimize the initial velocity field of a 2D Navier-Stokes simulation so that its vorticity evolves into a target image – demonstrating end-to-end differentiable programming through a physics simulator.
Why this matters¶
Gradient-based optimization of fluid flows is central to many engineering disciplines:
Aerodynamics – optimizing airfoil shapes or flow conditions to minimize drag
Heat exchanger design – finding flow configurations that maximize thermal transfer
Turbomachinery – tuning blade geometries for optimal performance
Microfluidics – designing lab-on-a-chip devices with precise flow control
Traditional CFD optimization relies on adjoint methods that require significant manual implementation effort. By wrapping a JAX-based Navier-Stokes solver in a Tesseract, we get automatic differentiation for free – gradients flow through the entire simulation without hand-coded adjoints. This makes it straightforward to plug the simulator into any gradient-based optimizer.
The concrete goal of this demo is to find initial conditions for which the final fluid flow’s vorticity matches a target image (the Pasteur Labs logo):
from IPython.display import Image
Image(filename="pl.png", width=200)
# Install additional requirements for this notebook
%pip install -r requirements.txt -q
[notice] A new release of pip is available: 25.0 -> 25.0.1
[notice] To update, run: pip install --upgrade pip
Note: you may need to restart the kernel to use updated packages.
Step 1: Build and serve the JAX-CFD Tesseract¶
The cfd-tesseract is a differentiable Navier-Stokes solver based on JAX-CFD, wrapped as a Tesseract. Its apply function takes an initial velocity field and simulation parameters, then integrates the semi-implicit Navier-Stokes equations forward in time.
Here is the apply function, as defined in cfd_tesseract/tesseract_api.py:
def cfd_fwd(
v0: jnp.ndarray,
density: float,
viscosity: float,
inner_steps: int,
outer_steps: int,
max_velocity: float,
cfl_safety_factor: float,
domain_size_x: float,
domain_size_y: float,
) -> tuple[jax.Array, jax.Array]:
"""Compute the final velocity field using the semi-implicit Navier-Stokes equations.
Args:
v0: Initial velocity field.
density: Density of the fluid.
viscosity: Viscosity of the fluid.
inner_steps: Number of solver steps for each timestep.
outer_steps: Number of timesteps steps.
max_velocity: Maximum velocity.
cfl_safety_factor: CFL safety factor.
domain_size_x: Domain size in x direction.
domain_size_y: Domain size in y direction.
Returns:
Final velocity field.
"""
...
We use the tesseract build CLI to build the Tesseract into a container image.
%%bash
# Build CFD Tesseract so we can use it below
tesseract build cfd-tesseract/
?25l [i] Building image ...
⠼ Processing
[i] Built image sha256:7632fcec515b, ['jax-cfd:latest']
["jax-cfd:latest"]
Next, we load the built image and start a server container using the Tesseract Python SDK. This gives us a running Tesseract instance we can call from Python.
from tesseract_core import Tesseract
cfd_tesseract = Tesseract.from_image("jax-cfd")
cfd_tesseract.serve()
Step 2: Test a forward evaluation with Tesseract-JAX¶
Before optimizing, let’s verify the Tesseract works by running a single forward evaluation. We set up the simulation parameters – a \(64 \times 64\) grid with periodic boundary conditions – and generate a random initial velocity field. The apply_tesseract function from tesseract-jax makes the Tesseract callable as a JAX-compatible function, which is essential for later gradient computation.
# Import necessary libraries
import jax
import jax.numpy as jnp
import jax_cfd.base as cfd
import matplotlib.animation as animation
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image as PILImage
from scipy.optimize import minimize
from tesseract_jax import apply_tesseract
from tqdm import tqdm
# Set up the CFD simulation parameters
seed = 0
size = 64
max_velocity = 3.0
domain_size_x = jnp.pi * 2
domain_size_y = jnp.pi * 2
bc = cfd.boundaries.HomogeneousBoundaryConditions(
(
(cfd.boundaries.BCType.PERIODIC, cfd.boundaries.BCType.PERIODIC),
(cfd.boundaries.BCType.PERIODIC, cfd.boundaries.BCType.PERIODIC),
)
)
grid = cfd.grids.Grid((size, size), domain=((0, domain_size_x), (0, domain_size_y)))
v0 = cfd.initial_conditions.filtered_velocity_field(
jax.random.PRNGKey(seed), grid, max_velocity
)
vx, vy = v0
params = {
"density": 1.0,
"viscosity": 0.01,
"inner_steps": 25,
"outer_steps": 30,
"max_velocity": max_velocity,
"cfl_safety_factor": 0.5,
"domain_size_x": domain_size_x,
"domain_size_y": domain_size_y,
}
# Define initial velocity field
v0 = np.stack([np.array(vx.array.data), np.array(vy.array.data)], axis=-1)
# Define the Tesseract function
def cfd_tesseract_fn(v0):
return apply_tesseract(cfd_tesseract, inputs=dict(v0=v0, **params))
# Apply Tesseract to the initial velocity field
outputs = cfd_tesseract_fn(v0)
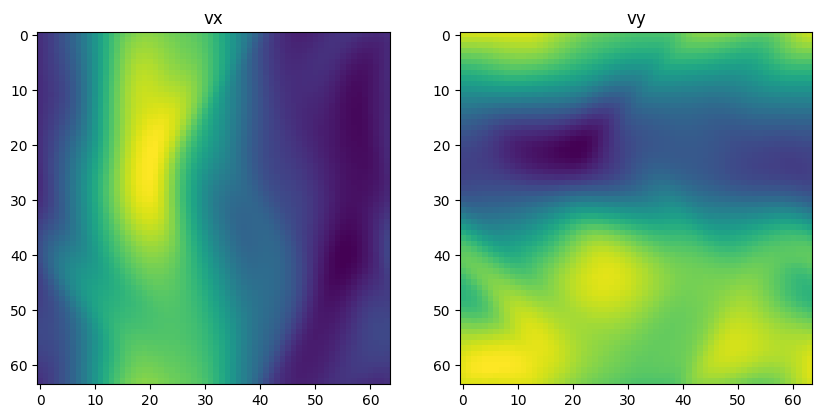
Using the forward pass output, we visualize the \(x\) and \(y\) components of the final velocity field as heatmaps. This confirms the simulation is producing physically reasonable flow patterns.
vxn = outputs["result"][..., 0]
vyn = outputs["result"][..., 1]
fig, ax = plt.subplots(1, 2, figsize=(10, 5))
ax[0].imshow(vxn, cmap="viridis")
ax[0].set_title("vx")
ax[1].imshow(vyn, cmap="viridis")
ax[1].set_title("vy")
Text(0.5, 1.0, 'vy')
Next we define a vorticity function for later use (recalling that vorticity is the curl of the flow velocity, ie. \(\omega = \nabla \times \mathbf{v}\)).
def vorticity(vxn, vyn):
vxn = cfd.grids.GridArray(vxn, grid=grid, offset=(1.0, 0.5))
vyn = cfd.grids.GridArray(vyn, grid=grid, offset=(0.5, 1.0))
# reconstrut GridVariable from input
vxn = cfd.grids.GridVariable(vxn, bc)
vyn = cfd.grids.GridVariable(vyn, bc)
# differntiate
_, dvx_dy = cfd.finite_differences.central_difference(vxn)
dvy_dx, _ = cfd.finite_differences.central_difference(vyn)
return dvy_dx.data - dvx_dy.data
Step 3: Optimize the initial state via gradient descent¶
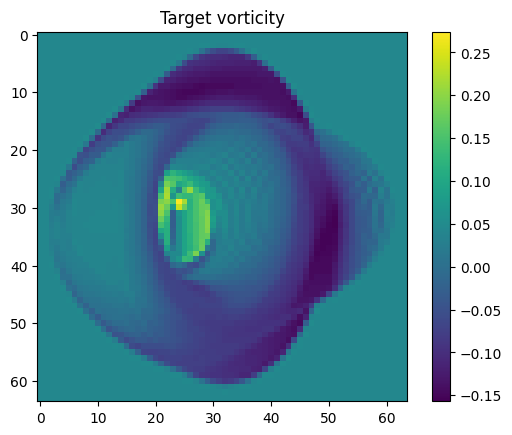
Now we perform the core task: finding an initial velocity field \(v_0\) such that the vorticity of the final state \(v_N\) resembles a target image. This is a high-dimensional optimization problem – the decision variable is the entire \(64 \times 64 \times 2\) velocity field (8,192 parameters). Without gradients, this would be intractable.
Let’s start by loading the target image.
img = plt.imread("pl.png")
img = img.mean(axis=-1)
img = PILImage.fromarray((img * 255).astype(np.uint8))
img_shape_y, img_shape_x = img.size
img = img.resize((size, size))
img = np.array(img).astype(np.float32) / 255.0
# normalize around 0
img = img - img.mean()
plt.imshow(img, cmap="viridis")
plt.colorbar()
plt.title("Target vorticity")
Text(0.5, 1.0, 'Target vorticity')
We define the loss function as the mean squared error between the simulated vorticity and the target image. To ensure physical realism, we add a penalty on the divergence of the initial velocity field – for an incompressible flow, \(\nabla \cdot \mathbf{v} = 0\). This acts as a soft constraint:
where \(\omega = \nabla \times \mathbf{v}\) is the vorticity.
def mse(x, y):
return jnp.mean((x - y) ** 2)
def divergence(vxn, vyn):
vxn = cfd.grids.GridArray(vxn, grid=grid, offset=(1.0, 0.5))
vyn = cfd.grids.GridArray(vyn, grid=grid, offset=(0.5, 1.0))
# reconstruct GridVariable from input
vxn = cfd.grids.GridVariable(vxn, bc)
vyn = cfd.grids.GridVariable(vyn, bc)
return cfd.finite_differences.divergence([vxn, vyn]).data
def loss_fn(v0_flat, target=img, xlen=grid.shape[0]):
total_len = len(v0_flat)
ylen = (total_len // 2) // xlen
v0x = v0_flat[: total_len // 2].reshape(xlen, ylen)
v0y = v0_flat[total_len // 2 :].reshape(xlen, ylen)
div = divergence(v0x, v0y)
vn = cfd_tesseract_fn(v0=jnp.stack([v0x, v0y], axis=-1))["result"]
vxn = vn[..., 0]
vyn = vn[..., 1]
vort = vorticity(vxn, vyn)
# add divergence penalty term to ensure the field is divergence free
return mse(vort, target) + 0.05 * mse(div, 0.0)
We use the L-BFGS-B optimizer from scipy.optimize.minimize to find the optimal initial velocity field. Because apply_tesseract makes the Tesseract a native JAX operation, jax.value_and_grad can differentiate through the entire CFD simulation automatically. This is the key advantage – no hand-coded adjoint solver is needed.
Executing this cell can take a few minutes.
v0_field = cfd.initial_conditions.filtered_velocity_field(
jax.random.PRNGKey(221), grid, max_velocity
)
v0_flat = np.array([vx.array.data, vy.array.data]).flatten()
grad_fn = jax.jit(jax.value_and_grad(loss_fn))
max_iter = 400
with tqdm(total=max_iter) as pbar:
i = 0
def callback(intermediate_result):
global i
i += 1
pbar.set_postfix(loss=f"{intermediate_result.fun:.4f}")
pbar.update(1)
opt = minimize(
grad_fn,
v0_flat,
method="L-BFGS-B",
jac=True,
callback=callback,
options={"maxiter": max_iter},
)
print(f"Optimisation converged after {i} iterations")
27%|██▋ | 109/400 [01:56<05:11, 1.07s/it, loss=0.0006]
Optimisation converged after 109 iterations
Step 4: Visualize the optimized flow¶
To see how the optimized initial condition evolves over time, we step through the simulation one outer step at a time and record the vorticity at each frame. This produces an animation showing the fluid flow gradually forming the target image.
v0_flat = opt.x
xlen = grid.shape[0]
ylen = grid.shape[1]
v0x = v0_flat[: xlen * ylen].reshape(xlen, ylen)
v0y = v0_flat[xlen * ylen :].reshape(xlen, ylen)
v0 = jnp.stack([v0x, v0y], axis=-1)
trajectory = []
vi = v0.copy()
params_2 = params.copy()
params_2.update({"outer_steps": 1})
# NOTE: We intentionally redefine cfd_tesseract_fn here with outer_steps=1
# (instead of 30) so we can capture intermediate frames for the animation.
# The original definition used params with outer_steps=30 for optimization.
def cfd_tesseract_fn(v0):
res = apply_tesseract(cfd_tesseract, inputs=dict(v0=v0, **params_2))
return res["result"]
for _ in range(30):
vi = cfd_tesseract_fn(vi)
vxn = vi[..., 0]
vyn = vi[..., 1]
vort = vorticity(vxn, vyn)
trajectory.append(vort)
# repeat last frame a few times
trajectory.extend([vort] * 10)
fig = plt.figure()
ims = []
for vort in trajectory:
im = plt.imshow(vort, cmap="plasma", animated=True)
# remove axis
plt.axis("off")
ims.append([im])
ani = animation.ArtistAnimation(fig, ims, interval=100, blit=True, repeat_delay=1000)
plt.close(fig)
ani.save("/tmp/vorticity.gif", writer="pillow", fps=10)
Image(filename="/tmp/vorticity.gif", embed=True)
Takeaways¶
In this tutorial, we optimized the initial conditions of a 2D Navier-Stokes simulation so that the resulting vorticity field matches a target image. Here are the key points:
Differentiable simulation via Tesseract. By wrapping JAX-CFD in a Tesseract, we obtained a self-contained, differentiable CFD solver. The
apply_tesseractfunction from tesseract-jax makes it seamlessly callable from JAX, with full gradient support.High-dimensional optimization made tractable. The initial velocity field has 8,192 parameters. Gradient-based optimization (L-BFGS-B) converged in ~100 iterations – this would be infeasible with gradient-free methods.
No hand-coded adjoints. The gradients flow automatically through the Tesseract’s JAX-based
applyfunction. Adding new physics or changing the objective requires no manual derivative implementation.Composability. The same Tesseract could be reused in other contexts – Bayesian inference, design optimization, or as a component in a larger differentiable pipeline – without any changes to the Tesseract itself.
# Tear down Tesseract after use to prevent resource leaks
cfd_tesseract.teardown()